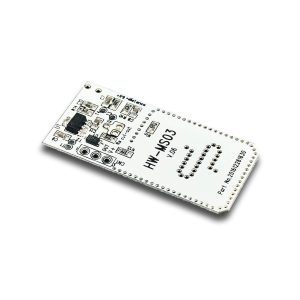
GY-56 VL53L0X Infrared Laser Ranging Module
The GY-56 Infrared Laser is a low-cost digital infrared range sensor module. Its operating voltage is 3- 5v, its power consumption is small, its size is small, and it is easy to install.
$19.95
4 in stock

This item: GY-56 VL53L0X Infrared Laser Ranging Module
4 in stock
$19.95
$19.95




Description
Additional information
Applications
Support & Utility
Q & A (1)
GY-56 VL53L0X is a time-of-flight (ToF) infrared laser ranging sensor that accurately measures distances using laser pulses. It is commonly used in robotics, drones, automation, and other distance-sensing applications.
The GY-56 Infrared Laser is a low-cost digital infrared range sensor module. Its operating voltage is 3- 5v, its power consumption is small, its size is small, and it is easy to install. Its working principle is that the infrared LED emits light and is irradiated.
After the object, the MCU receives the return light, which the MCU calculates. In this module, there are two ways to read data: Serial UART (TTL level) + IIC (2 lines) mode.
The serial port’s baud rate is configurable at 9600bps and 115200bps. Continuous inquiries are output in two ways. You can power off the save settings.
Specifications: |
|
Package Includes: |
|
Check Out our Clearance and on-sale items.
Development Resources: Demo Codes, Schematics, Datasheets, Etc |
|
| Hackaday serves up Fresh Hacks Every Day from around the Internet. | |
| Instructables is a community for people who like to make things. Explore, share, and do your next project with us! | |
| Where the world builds software | |
| Raspberry Pi Foundation: What would you like to make today? | |
Arduino’s mission is to enable anyone to enhance their lives through accessible electronics and digital technologies. |
|
| Wikipedia is a free online Encyclopedia created and edited by volunteers worldwide and hosted by the Wikimedia Foundation. | |
| Notes: |
|
| Weight | 0.010 kg |
|---|---|
| Dimensions | 8 × 5 × .3 cm |
Product Applications
Current Product Support
| SKU | Product | Type | Download/View |
|---|---|---|---|
| TS-P485 | GY-56 VL53L0X Infrared Laser Ranging Module - GY-56 UART communication’s packet data | Document | Download |
Q & A
Ask a question
Is it possible to get the UART communication's packet data format and commands for this module ?.
The GY-56 ultrasonic sensor module communicates using UART (Universal Asynchronous Receiver/Transmitter) protocol to transmit distance measurement data. Here's a typical outline of the packet data structure used in UART communication for the GY-56 sensor:
Start Byte: Usually a specific byte (often 0xFF or 0x55) indicating the start of a new data packet.
Command Byte: Specifies the type of data being transmitted. For distance measurement, this might be a specific command byte that indicates distance data.
Data Bytes: Actual measurement data, typically represented as a 16-bit integer (2 bytes) indicating the distance measured in millimeters or centimeters.
Checksum Byte: A byte used for error checking, often a simple XOR of all preceding bytes to ensure data integrity.
End Byte: Marks the end of the data packet. This could be another specific byte (like 0xFF or 0xAA) indicating the end of the packet.
Here’s a simplified example of how the packet might look:
Start Byte (1 byte)
Command Byte (1 byte)
Data Bytes (2 bytes for distance measurement)
Checksum Byte (1 byte)
End Byte (1 byte)
For instance, a possible packet could be structured as:
Start Byte: 0xFF
Command Byte: 0x01 (indicating distance measurement)
Data Bytes: 0x01 0xF4 (corresponding to a distance of 500 mm)
Checksum Byte: Calculated checksum based on preceding bytes
End Byte: 0xAA
Please note, the exact bytes used for start, end, and checksum might vary based on the specific implementation or manufacturer's design. It's crucial to refer to the datasheet or documentation provided with your GY-56 module for precise details on the UART communication protocol it uses
(0)
(0)
Add an answer
Related Products